ZeroDrift™
Transfer-Drift — Der Fehler, über den niemand spricht
Die stille Abweichung zwischen Ihrem CAD-Design und der Artikulator-Verifikation. Jedes gipsfreie System hat sie. Keines davon nennt sie beim Namen.

Verfasst von Antonello Croce
Erfinder & Gründer

Der Moment, in dem Sie wissen, dass etwas nicht stimmt
Sie haben die Kontakte in CAD gestaltet. Leicht, gleichmäßig, genau dort, wo Sie sie wollten.
Sie haben das STL exportiert. Der Druck kam sauber heraus — Basis, Zähne, Stützstrukturen ließen sich ohne Mühe abtrennen. Sie haben das Modell auf den Artikulator montiert. Sie haben ihn geschlossen.
Und der Pin kehrte nicht auf null zurück.
Sie öffnen ihn. Sie prüfen die Kontakte. Einige sind da. Einige fehlen. Einige sitzen an Stellen, an die Sie sie nie gesetzt haben. Die Übereinstimmung zwischen dem, was auf Ihrem Bildschirm und dem, was auf Ihrer Werkbank ist, ist verschwunden — und Sie wissen nicht, warum.
Also beginnt die Schleife. Sie prüfen den Scan. Der Scan ist in Ordnung. Sie prüfen den Druck. Die Maße wirken korrekt. Sie prüfen die Bissregistrierung. Korrekt. Sie prüfen den Artikulator. Er scheint in Ordnung. Sie montieren das Modell erneut. Dasselbe Ergebnis. Vielleicht leicht anders. Das ist schlimmer.
Jetzt beginnt der Zweifel. Liegt es am Harz? Am Drucker? Am CAD-Design? Am Artikulator? Liegt es an mir?
Jedes digitale Labor kennt dieses Szenario. Jede Woche. Manchmal jeden Tag. Es kostet Zeit, Material und — leise, schleichend — Vertrauen in den gesamten Workflow, den Sie über Jahre und für Zehntausende Euro aufgebaut haben.
Und bis heute hatte das Problem nicht einmal einen Namen.
Jetzt schon.
Es heißt transfer drift.
Was transfer drift tatsächlich ist
Transfer drift ist die kumulative Positionsabweichung, die auftritt, wenn ein 3D-gedrucktes Modell aus der digitalen Konstruktionsumgebung in einen physischen Artikulator übertragen wird.
Es ist nicht ein einzelner Fehler. Es ist die Summe mehrerer unkontrollierter Variablen, die genau in dem Moment zusammenwirken, in dem digital analog wird — beim Übergang. Jede für sich ist gering. Zusammen sind sie der Grund, warum Ihre Kontakte nicht übereinstimmen.
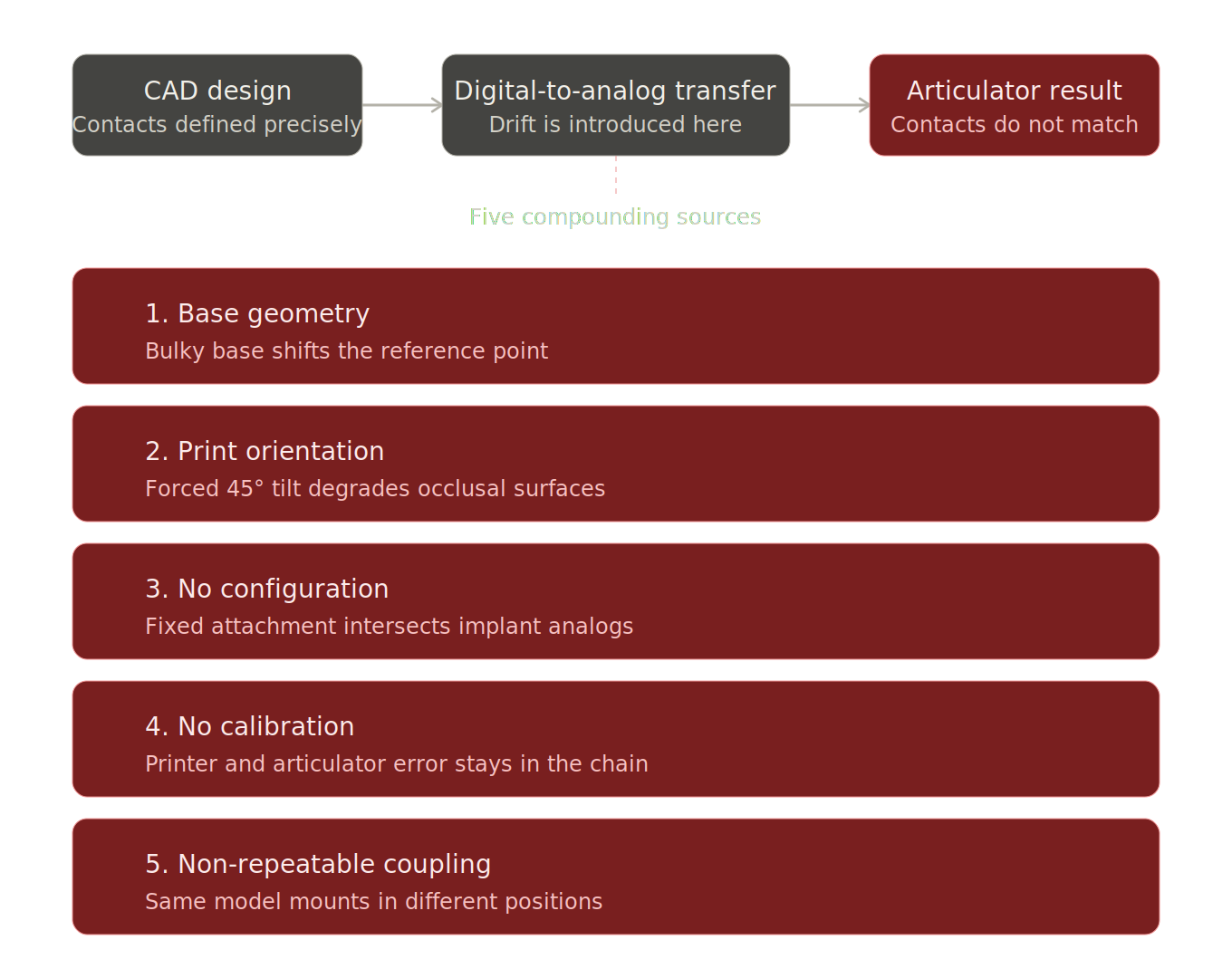
Es gibt fünf Ursachen:
Basisgeometrie, die den Referenzpunkt verschiebt. Die Montagebasis der meisten gipsfreien Systeme ist so voluminös, dass sie einen eigenen Koordinatenversatz einführt. Die Position, die Ihre CAD-Software definiert, ist nicht die Position, die der Artikulator sieht.
Erzwungene Druckausrichtung. Wenn die Basisgeometrie zu groß ist, um flach gedruckt zu werden, wird das Modell auf 45° (oder noch stärker) gedreht. Die Druckhöhe steigt. Schichtartefakte verlagern sich auf die okklusalen Flächen. Zähne — die immer am besten horizontal gedruckt werden — verlieren genau dort an Definition, wo Definition am wichtigsten ist.
Keine modulare Konfiguration. Eine einzelne feste Aufnahme kann sich nicht an fallbezogene Anatomie anpassen. Bei Implantatfällen kollidiert die Basis physisch mit Analoga. Sie passen das Design dem System an, nicht umgekehrt.
Keine Kalibrierung. Jeder Drucker hat eine Z-Achsen-Drift. Jedes Harz verhält sich leicht anders. Jeder Artikulator hat seine eigene mechanische Toleranz. Nichts davon wird berücksichtigt. Das System geht davon aus, dass der Drucker, das Harz und der Artikulator jedes Anwenders perfekt sind. Keines davon ist es.
Nicht reproduzierbare magnetische Kopplung. Montieren Sie dasselbe Modell zweimal, und Sie erhalten zwei leicht unterschiedliche Positionen. Ohne definierte Referenz ist „Wiederholbarkeit“ ein Marketingbegriff, keine Messgröße.
Jeder Schritt nach „export STL“ erzeugt Drift. Niemand misst sie. Niemand spezifiziert sie. Niemand garantiert dagegen.
Das ist das Problem.
Warum gipsfreie Systeme es verschlimmern
Die Kategorie der gipsfreien Systeme hat das falsche Problem gelöst.
Ja — Gips ist langsam. Ja — Gips ist unordentlich. Ja — Gips ist der Teil des Workflows, den niemand vermisst. Aber Gips hat trotz all seiner Schwächen eines außergewöhnlich gut gemacht: Er schuf eine starre, passgenaue Schnittstelle zwischen Modell und Artikulator. Der Gips passte sich der einzigartigen Geometrie Ihres Falls an. Der Referenzpunkt war der Fall selbst.
Magnetische gipsfreie Systeme ersetzten diese passgenaue Schnittstelle durch eine standardisierte — und tauschten damit ein Problem gegen vier neue:
Voluminöse Basen, die physisch mit Implantatanaloga kollidieren. Bei den Fällen, die am wichtigsten sind — Vollbögen, mehrere Implantate, komplexe Versorgungen — ist die Basis selbst das Hindernis. Sie können das System nicht einmal einsetzen. Oder noch schlimmer: Sie setzen es ein und erzwingen einen Kompromiss im Design.
Basisgeometrien, die so groß sind, dass sie eine 45°-Druckausrichtung erzwingen. Was Sie an Gips einsparen, zahlen Sie bei der Druckzeit zurück. Und die Zähne — die für maximale Oberflächenpräzision horizontal gedruckt werden sollten — fallen schlechter aus als das Modell, das Sie früher aus einem Steinguss gefertigt haben.
Keine modulare Konfiguration. Eine Geometrie. Ein Befestigungsmuster. Nehmen Sie es oder lassen Sie es. Das System passt sich nicht Ihrem Fall an. Ihr Fall passt sich dem System an.
Keine Kalibrierung für Ihren Drucker oder Ihren Artikulator. Das Werk geht von einer perfekten Welt aus. Sie arbeiten nicht in einer perfekten Welt. Sie arbeiten in Ihrem Labor, mit Ihrem konkreten Drucker, Ihrem konkreten Harz und Ihrem konkreten Artikulator — und das System hat zu keinem davon etwas zu sagen.
Sie beseitigen nicht den Fehler. Sie beseitigen Gips — und ersetzen ihn durch vier neue Fehlerquellen, die Sie nicht sehen, nicht messen und nicht beheben können.
Das ist transfer drift. Konstruiert in genau die Systeme, die versprachen, es zu lösen.
Die Kosten des unsichtbaren Fehlers
Transfer drift bleibt unsichtbar, bis Sie es zählen.
Jedes Mal, wenn die Kontakte nicht dem entsprechen, was Sie konstruiert haben, geschieht eines von drei Dingen:
Sie prüfen erneut. 10–15 Minuten pro Fall. Multiplizieren Sie das mit jedem Fall, in dem sich Zweifel einschleichen. Die Rechnung wird schnell unschön.
Sie korrigieren an der Werkbank. Schneller — aber jeder Schleifvorgang ist ein Kompromiss am digitalen Design, das Sie in CAD mit viel Zeit perfektioniert haben. Sie korrigieren analog mit analog und machen die Präzision rückgängig, für die Sie bezahlt haben.
Sie fertigen neu. Der Fall kommt aus der Praxis für eine Korrektur zurück, die nie hätte nötig sein dürfen. Material, Zeit und die teuerste Kostenposition von allen — Ihre Glaubwürdigkeit beim Zahnarzt.
Bei einem Einzelzahnfall sind die Kosten ärgerlich. Bei einem Full-Arch-Implantatfall im Wert von mehreren Tausend Euro ist ein unkontrollierter Transfer ein finanzielles Ereignis. Der Fall kommt zurück. Das Labor trägt die Neuanfertigung. Die Beziehung zur Praxis kühlt ab.
Jetzt skalieren Sie das.
10 Fälle pro Tag. 250 Arbeitstage pro Jahr. 2,500 Fälle jährlich. Wenn transfer drift Sie bei nur einem Viertel dieser Fälle 10 Minuten kostet, sind das über 100 Stunden pro Jahr — mehr als zwei volle Arbeitswochen — die Sie damit verbringen, einen unsichtbaren Fehler zu korrigieren, vor dem Sie niemand gewarnt hat.
Transfer drift ist kein Präzisionsproblem. Es ist ein Produktivitätsverlust, ein Margenkiller und — leise, über Jahre — ein Vertrauensproblem, das Sie fragen lässt, ob digital überhaupt der richtige Schritt war.
Es war. Das Transfersystem war der falsche Schritt.
Warum es bisher niemand benannt hat
Es gibt einen Grund, warum transfer drift in der Dental-Labor-Welt nicht als anerkannte Kategorie existiert: Jeder Wettbewerber führt denselben Kampf um Standardware.
Gipsfrei. Schnell. Kompatibel. Einfach.
Vier Worte. Fünf Wettbewerber. Identischer Pitch. Wenn alle dasselbe sagen, sagt niemand etwas — und das eigentliche Problem bleibt unsichtbar.
Das eigentliche Problem — die Lücke zwischen dem, was Sie konstruieren, und dem, was Sie verifizieren — wurde nie benannt, weil es zu benennen bedeuten würde, einzugestehen, dass „plaster-free“ allein es nicht löst. Es würde bedeuten, einzugestehen, dass die Systeme, die ein Workflow-Problem beheben sollten, leise vier schlimmere eingeführt haben. Kein Wettbewerber hat einen Anreiz, ein Problem zu benennen, das sein eigenes Produkt erzeugt.
Also blieb das Problem namenlos. Techniker gaben sich selbst die Schuld, ihren Druckern, ihrem Harz, ihren Artikulatoren. Sie gaben allem die Schuld außer dem System, das zwischen ihnen und einem verifizierten Ergebnis stand.
DACOS nennt es: transfer drift.
Und dann löst DACOS es.
Entdecken Sie, wie ZeroDrift™ Transfer jede Driftquelle eliminiert
Das einzige Transfer Fidelity System, das so konstruiert wurde, dass garantiert wird, dass das, was Sie in CAD entwerfen, exakt das ist, was Sie am Artikulator verifizieren.
— Antonello DACOS — dacos.dental
Das DACOS Omni system ist durch internationale Patentanmeldung geschützt.